کانسپت سطوح خودمختاری برای اتومبیلهای خودران، نخستین باز از سوی جامعهی بینالمللی مهندسین خودرو در سال ۲۰۱۴ مطرح شد. در گزارشی که توسط این جامعه منتشر شد، وضعیت خودمختاری اتومبیلها را میتوان در شش سطح توصیف کرد؛ از مرحلهی صفر - که کنترل اتومبیل به صورت کامل بر عهدهی راننده است - تا مرحلهی ۵ - که اتومبیل نیاز به هیچگونه مداخلهای توسط راننده ندارد. خودروهای نیمه-مختار میتوانند در بخشهایی از سفرها به راننده کمک کنند؛ اگرچه راننده برای طی کردن یک سفر - از لحظهی اول تا لحظهی آخر - همواره نیازمند کنترل آگاهانه برای تغییر وضعیت از مراحل گوناگون خودمختاری اتومبیل است. این تغییرات تدریجی موجب نگرانیهای ایمنی میشود؛ چرا که راننده ممکن است در برخی وضعیتها نتواند به طور کامل از وضعیت اطراف خود آگاه باشد.
پروژهی «صندلی هوشمند» در قالب یک همکاری آکادمیک میان توییک و لابراتوار soft habptics and robotics در دانشکدهی مهندسی مکانیک دانشگاه UCL انگلستان، به عنوان بخشی از پروژهی اروپایی بزرگ iseat شکل گرفت. هدف پروژهی iseat، ارائهی یک طرح رابط کاربری جدید بررای اتومبیلهای نیمه-خودران است؛ طرحی که تفاوتهای بنیادین با سیستمهای کنونی ارائهشده - مانند سیستم autopilot کمپانی تسلا و یا سیستم distronicplus کمپانی مرسدس بنز - دارد؛ سیستمهایی که بر پایهی تعاملات دیداری و شنیداری کار میکنند و ممکن است در شرایط خاص تمرکز راننده را تحت تاثیر قرار دهد و یا برای مغز او بار ذهنی سنگینی داشتهباشد. در مقابل، پروژهی iseat، گونهای از یک صندلی هوشمند را پیشنهاد میدهد که به پشتوانهی اندازهگیری میزان درگیری فیزیکی و ذهنی راننده، تغییرات تدریجی میان سطوح گوناگون خودمختاری اتومبیل را برای راننده تسهیل کرده، و سفری ایمنتر را نتیجه میدهد.
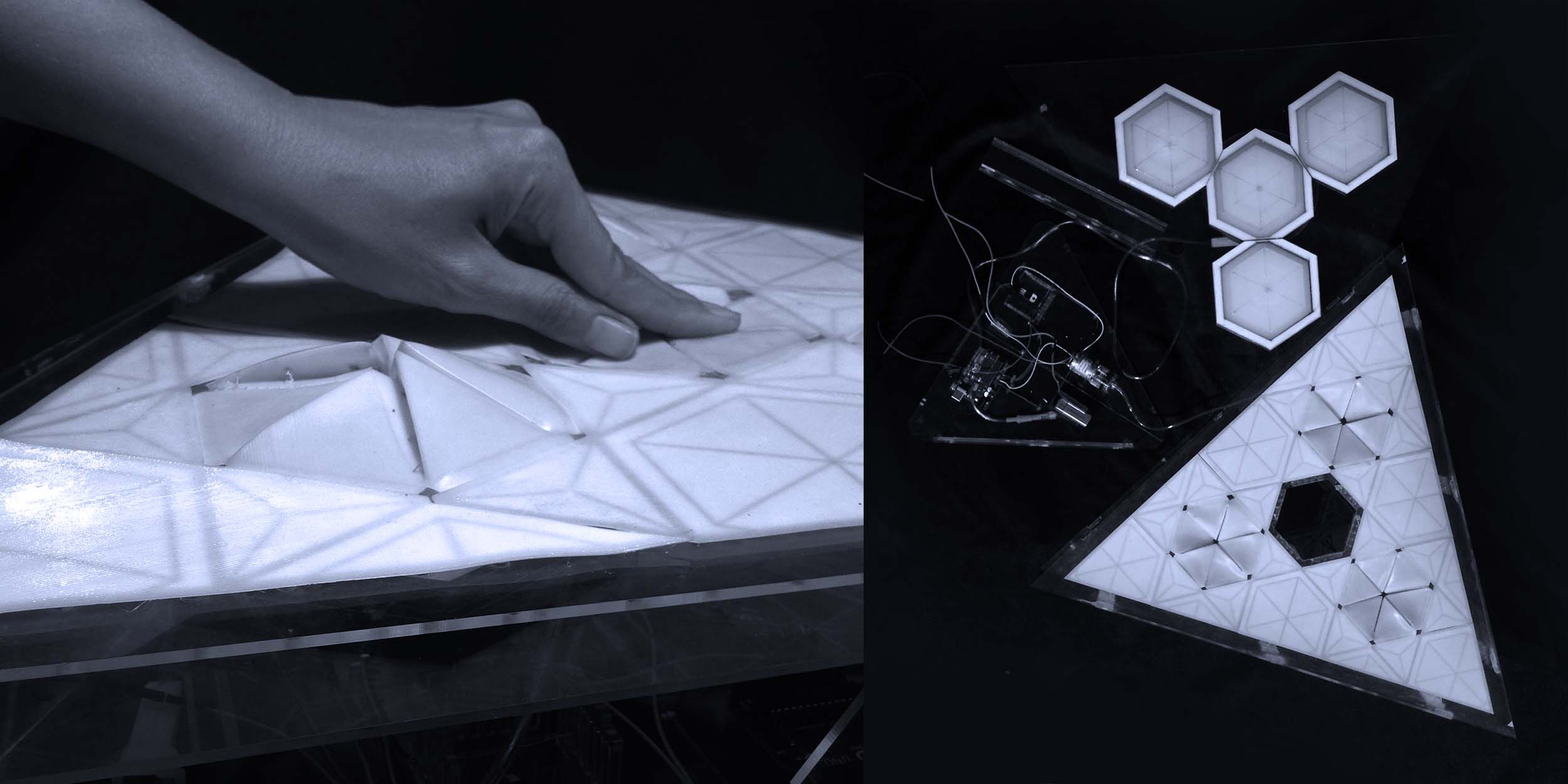
پروژهی «صندلی هوشمند» بر پتانسیلهای حس لامسه در افزودن یک لایهی هوشمند به صندلی تمرکز کرد؛ لایهای که صندلی را به یک رابط کاربری - که مساحت زیادی از بدن را در بر میگیرد - تبدیل میکند. نتیجهی این استودیو، دو پروژهی زیر بود که در دو مسیر متفاوت، ظرفیتهای soft robotics را برای خلق یک صندلی هوشمند مورد آزمایش قرارداد.
.
.
.
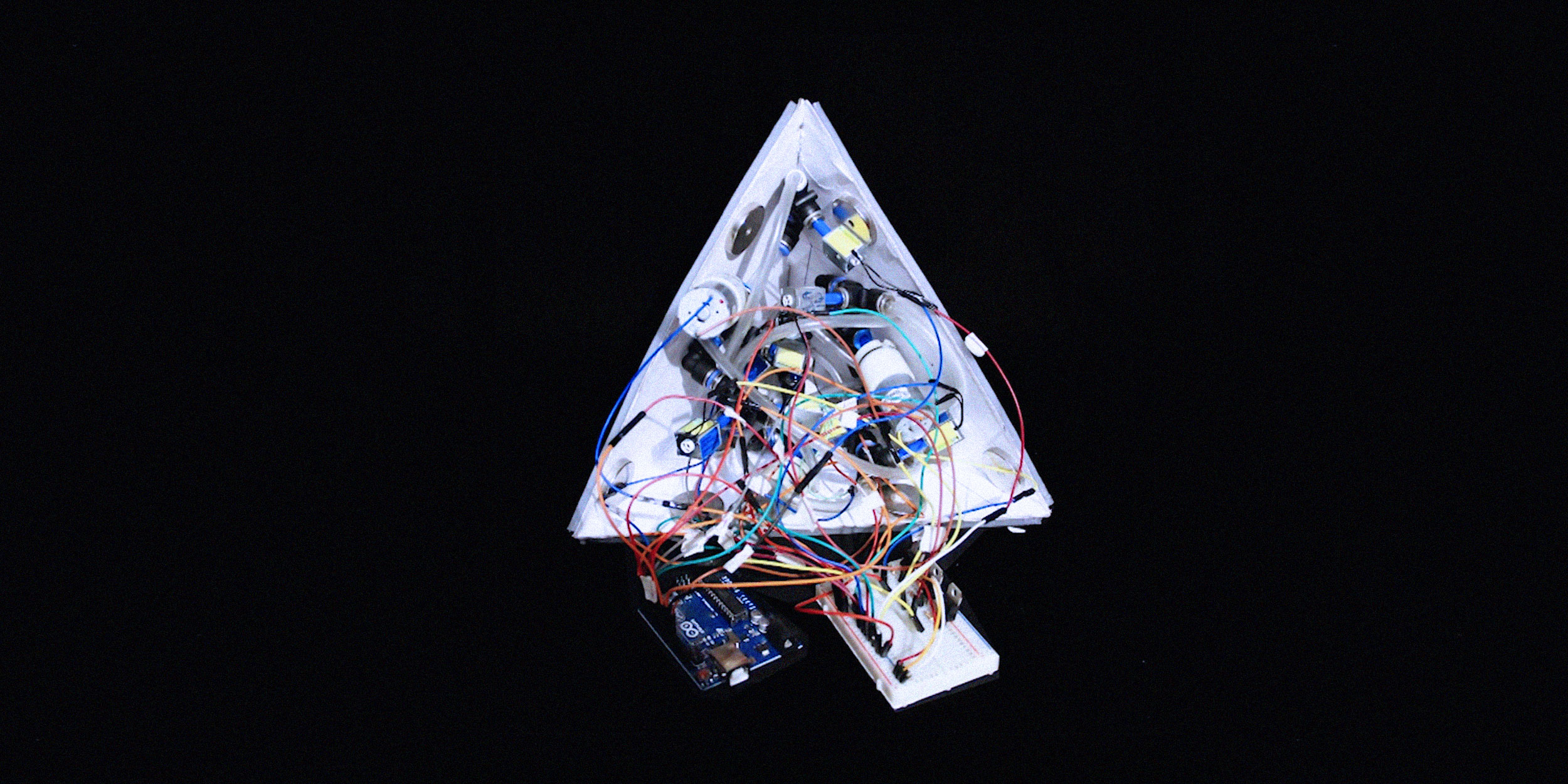
Poking Seat Project | From Inaction to Interaction
هماهنگکننده : نشید نبیان
حمایت آکادمیک : Helge Wurdemann . Bani Anvari
مشاوران استودیو : رها اشرفی . مهدی نجفی
پژوهش و طراحی : سحر عسگری . منان غنیزاده . هدی اسکندرنیا . محمدرضا هدایتی (همکاری پارهوقت)