
February, 2018
SmartSeat



The concept of autonomy levels for the self-driving vehicles was first published by the Society of Automotive Engineers (SAE International) in 2014. The report defines six levels of autonomy that automakers would need to achieve on their way to building the no-steering-wheel self-driving bubble pods of the future reaching from the fully-manual Level 0 to the fully-autonomous Level 5, where there is no interference required by the human.
These semi-autonomous cars might be able to transport the driver autonomously on sections of a journey. However, the driver is required to take control occasionally between different levels of autonomy when required to complete an end-to-end journey. These transitions between autonomy levels cause safety concerns, as the driver might not be fully aware of the surrounding situation and the enabled autonomy features instantly.
SmartSeat was a collaborative studio, defined and developed by TUIC in partnership with Soft Haptics and Robotics Lab at the Department of Mechanical Engineering, University College London, and as a sector of an umbrella EU-funded project called iSeat. iSeat proposes a new interface design for semi-autonomous cars, which is fundamentally different compared to current systems (such as Tesla's Autopilot or Distronic Plus by Mercedes) using visual or auditory indications which might be mentally overloading and distracting for the driver. iSeat is an intelligent driver seat acting as a co-pilot measuring the current mental and physical engagement of the driver and allowing safe, coordinated and timely transitions between different levels of autonomy.
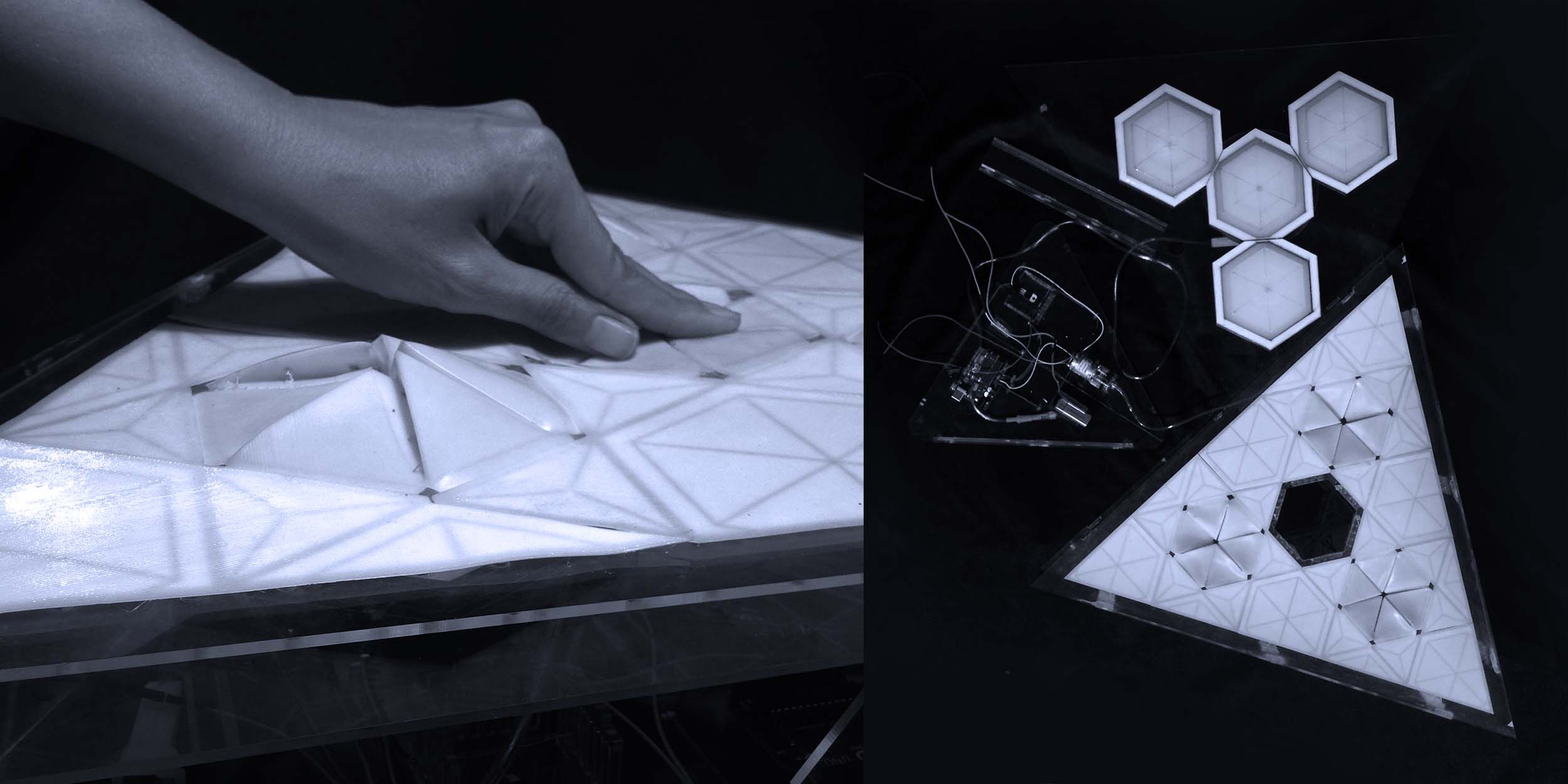
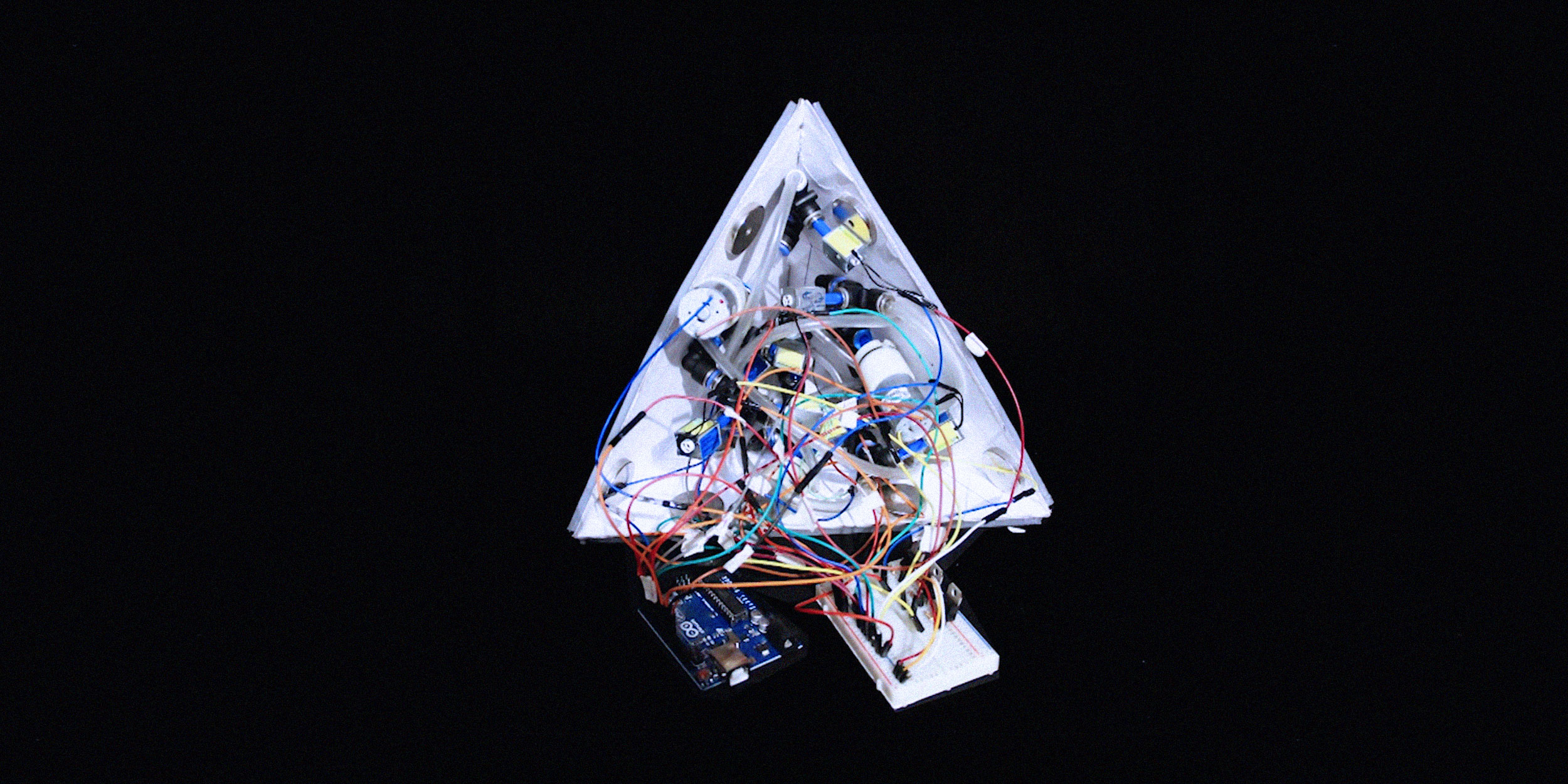
SmartSeat studio explored the potentials of haptics and tactility in adding a layer of intelligence into the seat as tangible interface that embraces a majority of body. The outcome of the studio was two projects called “Poking Seat” and “[in]formal Seat”.
.
.
.
Poking Seat Project | From Inaction to Interaction
Studio Coordinator : Nashid Nabian
Academic Support : Helge Wurdemann, Bani Anvari
Studio Tutors : Raha Ashrafi, Mahdi Najafi
Design and Research Team : Sahar Asgari, Hoda Eskandar Nia, Mannan Ghanizadeh Gerayli, M.Reza Hedayati (part-time)
[ Video ] [ Booklet ]
.
[in]formal Seat Project | Decentralized Modular Robots, Shaping a Dual-Mode Seating Experience
Studio Coordinator : Nashid Nabian
Academic Support : Helge Wurdemann, Bani Anvari
Studio Tutors : Raha Ashrafi, Mahdi Najafi
Design and Research Team : Sasan Bahrami, Sajjad Mansournia, Oveis Shahnaei, Masoud Valinejad
[ Video ] [ Booklet ]
.
<